UBTECH New Generation
of Industrial Humanoid Robot
of Industrial Humanoid Robot

The World's First Humanoid Robot
Capable of Autonomous Battery Swapping
Capable of Autonomous Battery Swapping


UBTECH develops the world-first autonomous hot-swappable battery swap system for humanoid robots. With its dual-battery dynamic balancing and dual-arm coordinated precision battery swapping technologies,Walker S2 is able to swap battery autonomously within 3 minutes.
The dual-battery switching design enables Walker S2 to switch between dual-battery and single-battery working mode. By integrating the real-time battery monitoring management with battery swap stations, Walker S2 can autonomously choose battery swap or charge mode according to the task priorities, and acheive dynamic power management.


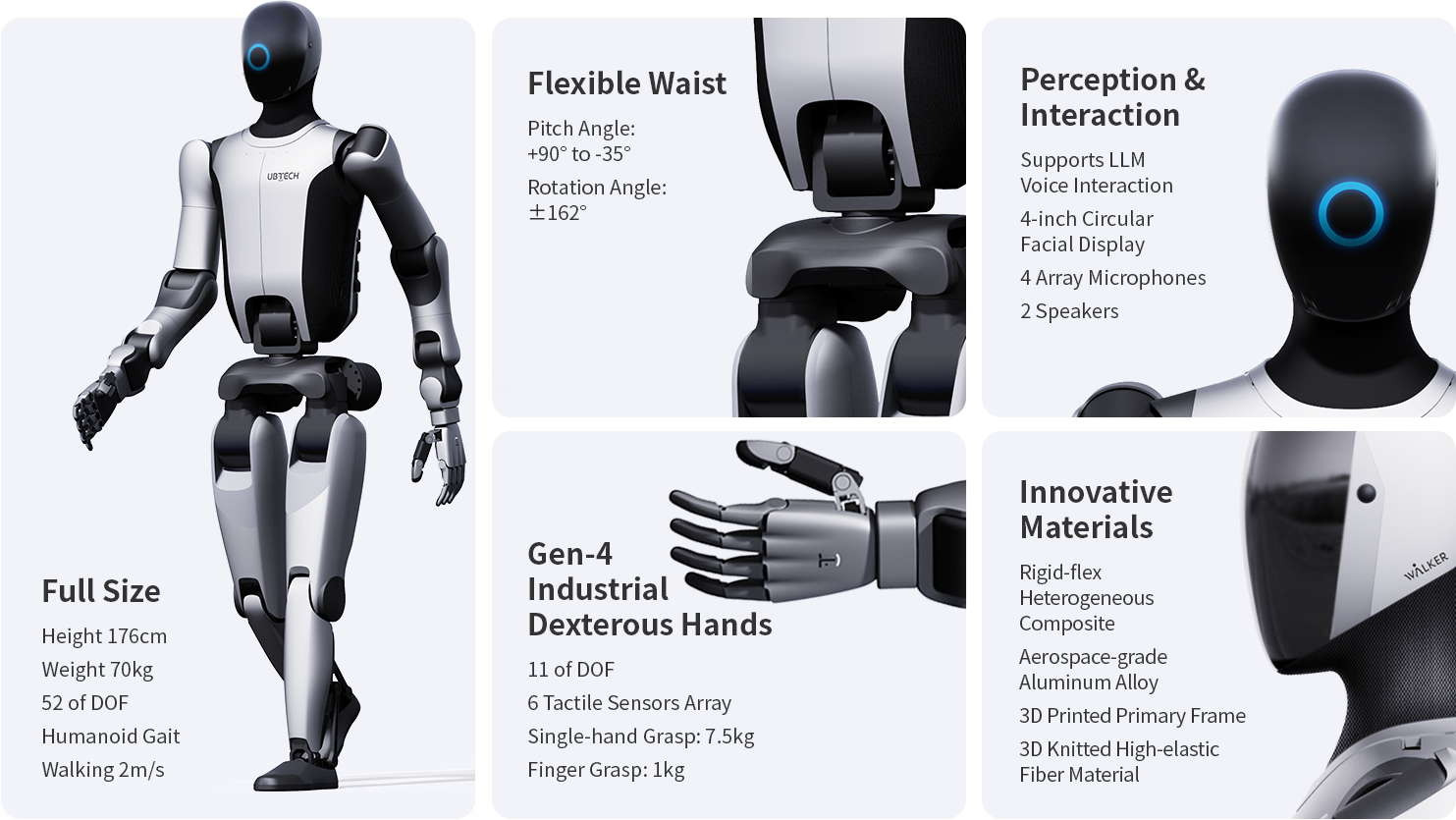
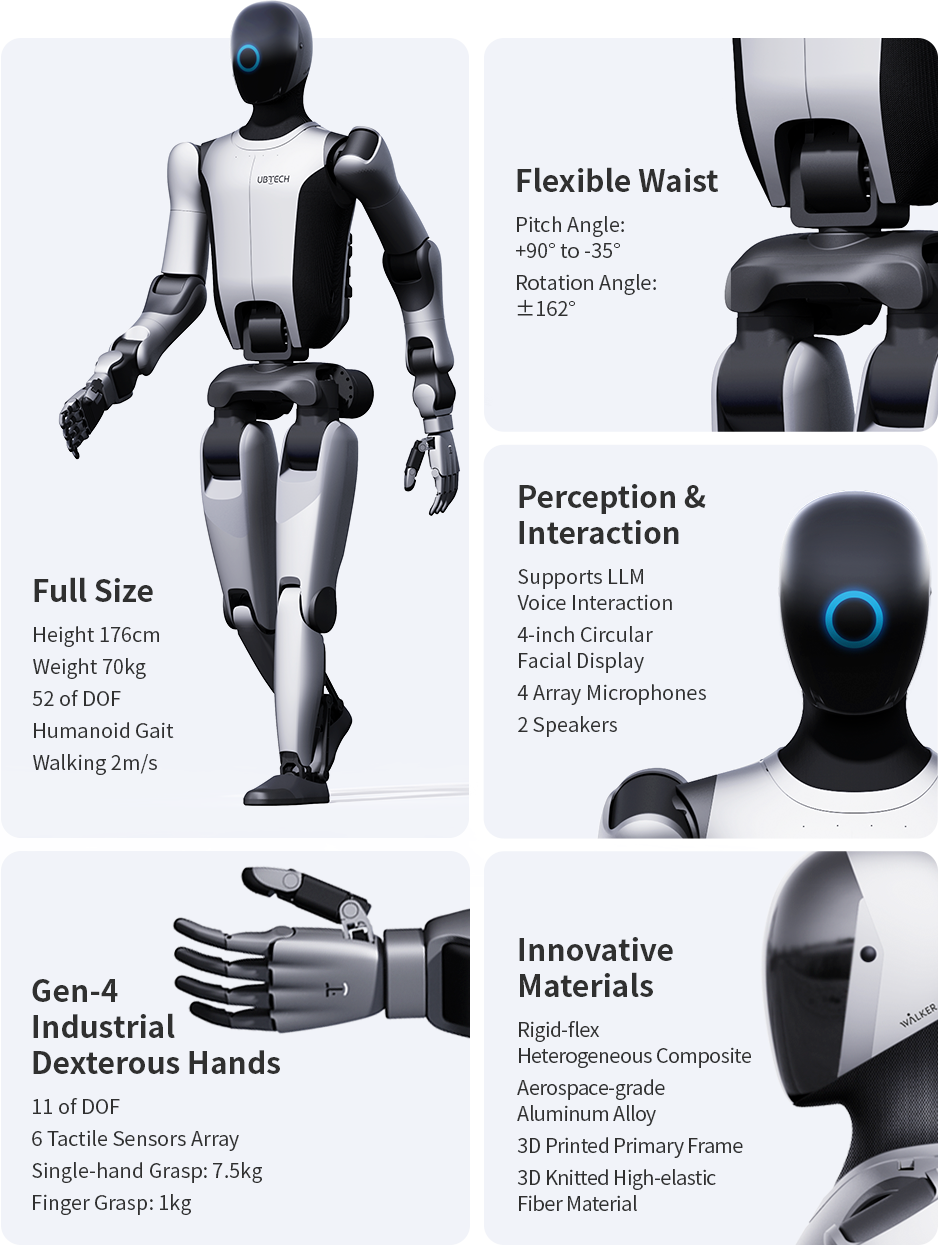
With the innovative high-power and high-torque waist servo motor design, Walker S2 can lift 15kg payload and reach ±162° rotation angle, achieving ground-reaching flexibility and extended-reach manipulation.
With the whole-body human-like dynamic balancing algorithm, Walker S2 can pitch 170° angle and handle 15kg payload within 0-1.8 meters workspace.


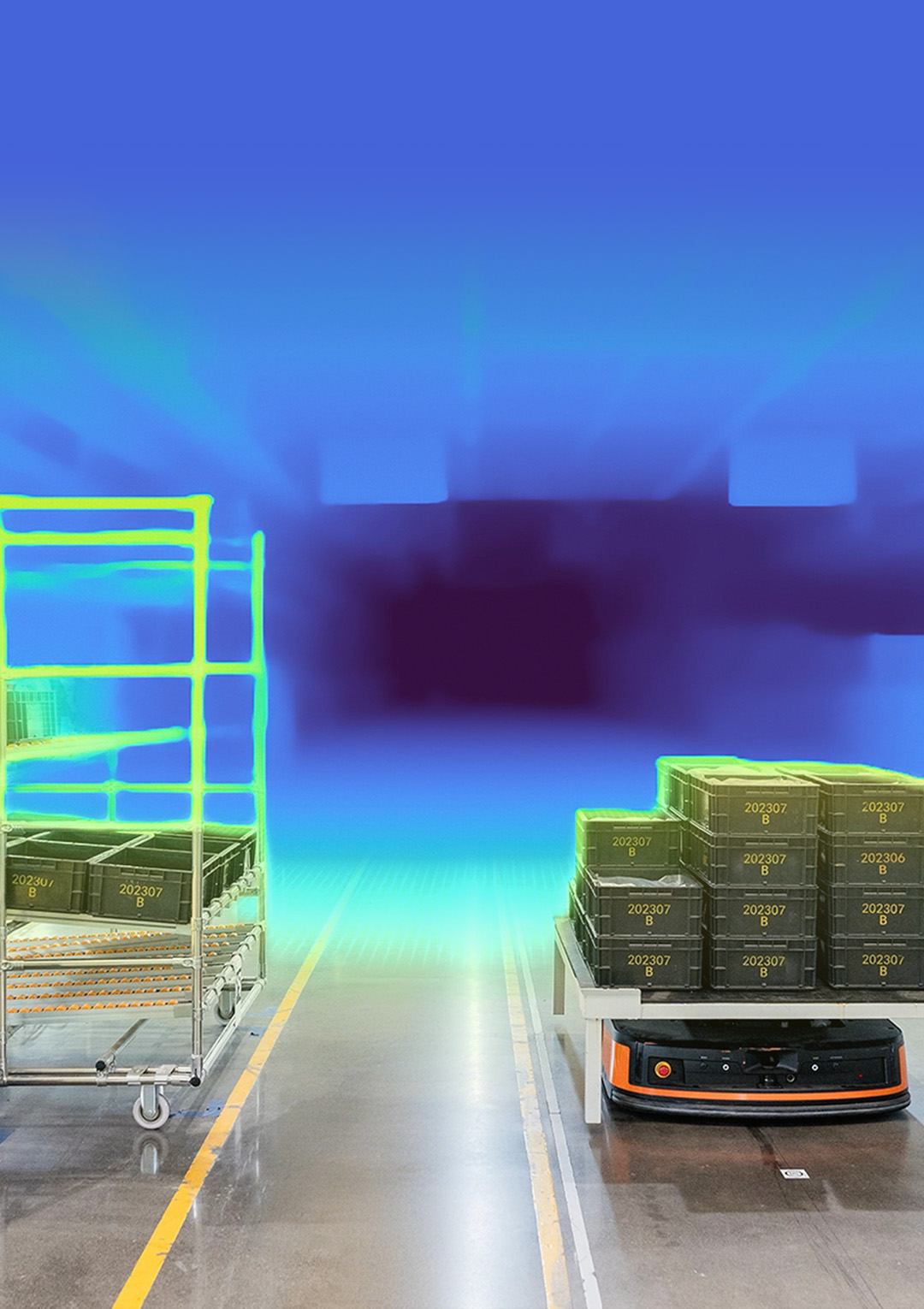
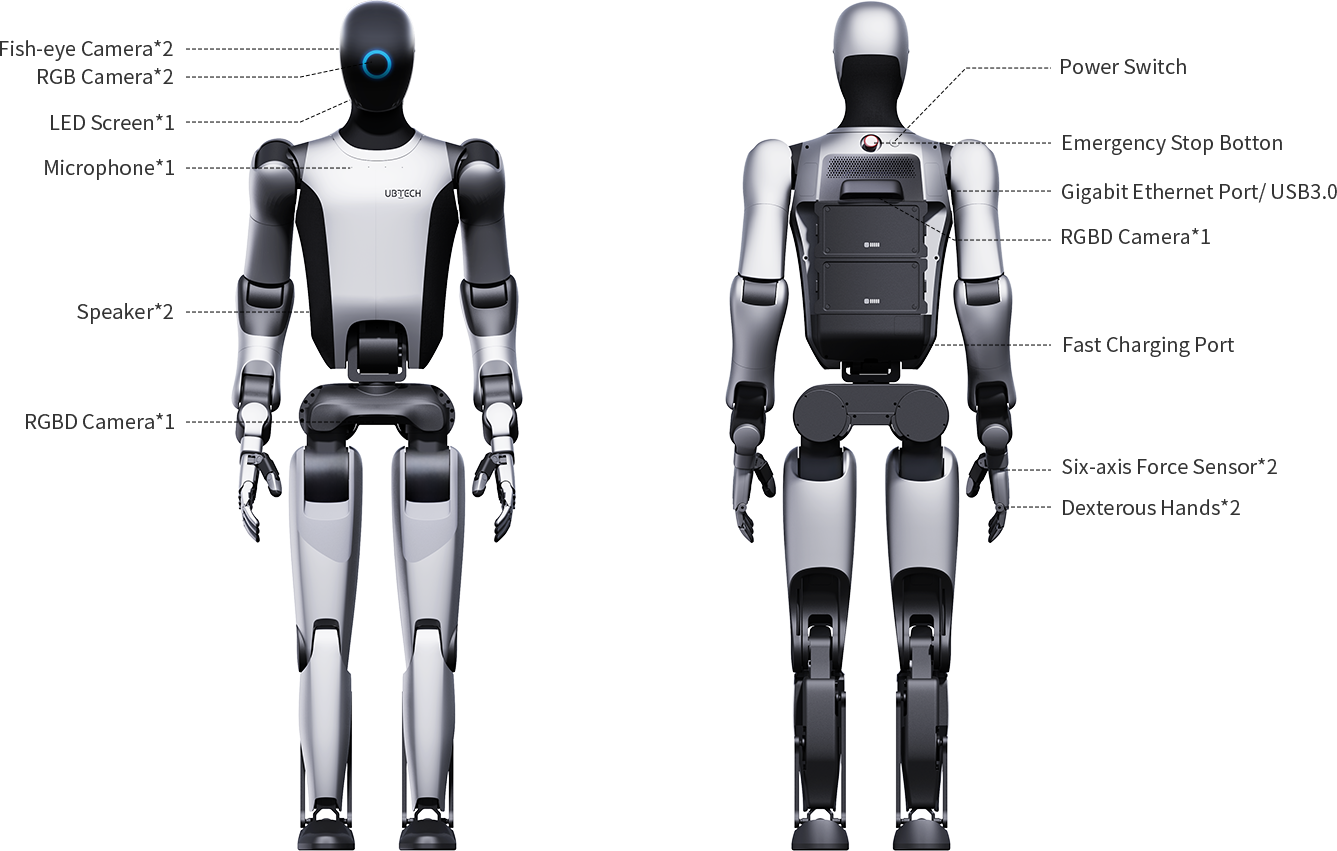
The pure RGB binocular stereo vision solution is built in Walker S2's head. The self-developed passive binocular vision system employs deep learning-based stereo depth estimation algorithms to generate high-precision, left-aligned dense depth maps in real-time. This enables Walker S2 to achieve "human-eye" stereoscopic perception capabilities.