

大型人形机器人Walker虚拟仿真平台
大型人形机器人Walker虚拟仿真平台
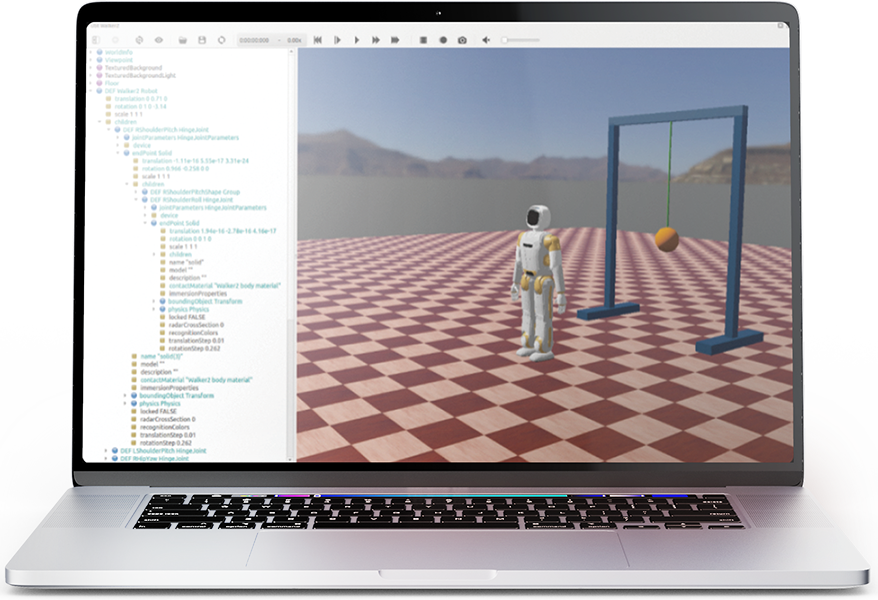
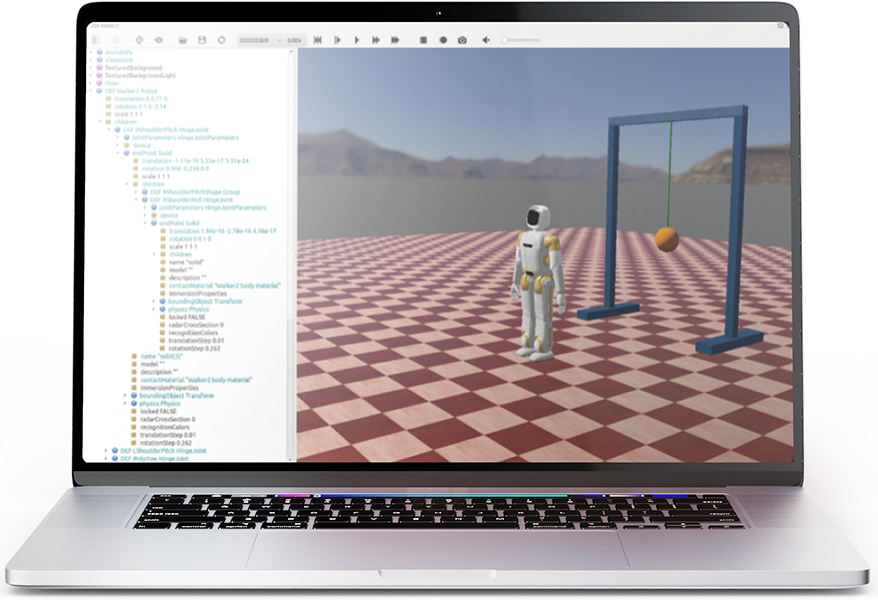
Walker虚拟仿真基于开源动力学引擎与3D渲染引擎而开发,可以描述机器人与工作环境的动态变化过程,而不依赖于实际的机器人。具备超高的逼真性仿真环境、丰富的传感器配置及接口,可快速实现仿真代码在真机上的移植并复用,提升开发效率。
系统架构


效果展示
推动恢复
不平整地面
脚印规划
开冰箱
上楼梯
推车
核心功能

提供精确
机器人仿真模型
提供多传感器模型
与接口
提供多个
虚拟环境场景
提供具备机器人控制
接口及文档
提供可靠的基础
DEMO验证
产品优势

接口丰富
支持C,C++,Python,Matlab,ROS
传感器丰富
包含位置、速度、力矩传感器等
场景/环境丰富
多场景环境可选,可拓展教研和竞赛平台
应用案例
Walker大型人形机器人仿真挑战赛
优必选科技联合机器之心在2020世界人工智能大会云端峰会上推出【走进未来·Walker大型人形机器人仿真挑战赛】,首次在仿真平台中对外开放Walker模型及相关数据,邀请全球高校、科研机构以及顶级开发者参与比赛,研发完成15项不同难度的任务,共同推进Walker大型人形机器人、大型人形机器人的落地应用和研发,实现有朝一日“让机器人走进千家万户”。
