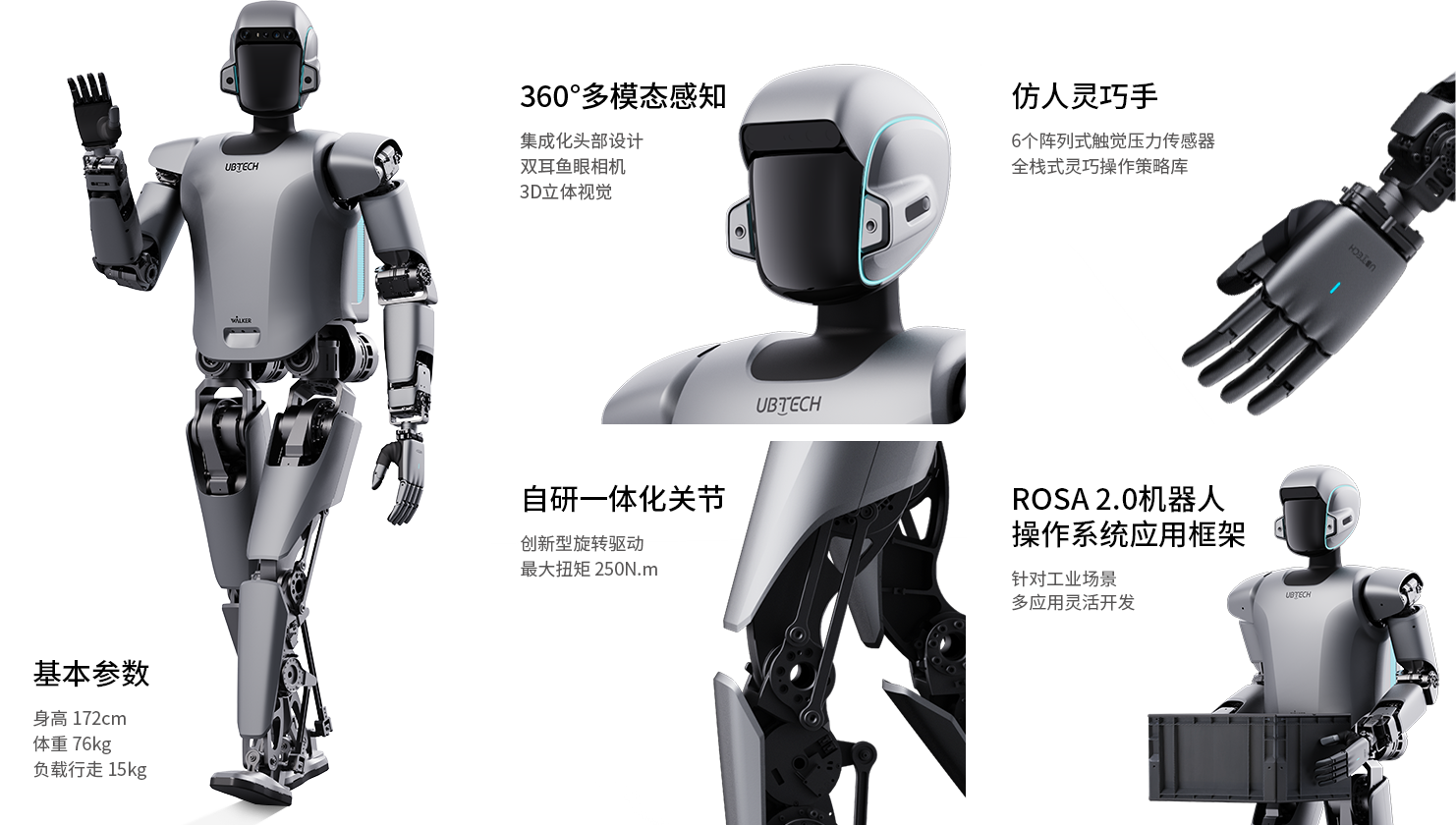
优必选基于人形机器人全栈式技术,开发面向通用任务的多模态规划大模型、语义VSLAM、学习型运动控制等具身智能关键技术, 赋予Walker S1更聪明的大脑和敏捷的小脑,满足其工业场景内的泛化应用需求,推动人形机器人的商业化和产业化进程。
合作伙伴
优必选基于人形机器人全栈式技术,开发面向通用任务的多模态规划大模型、语义VSLAM、学习型运动控制等具身智能关键技术, 赋予Walker S1更聪明的大脑和敏捷的小脑,满足其工业场景内的泛化应用需求,推动人形机器人的商业化和产业化进程。

优必选基于人形机器人全栈式技术,开发面向通用任务的多模态规划大模型、语义VSLAM、学习型运动控制等具身智能关键技术, 赋予Walker S1更聪明的大脑和敏捷的小脑,满足其工业场景内的泛化应用需求,推动人形机器人的商业化和产业化进程。

通过融合训练面向通用任务的多模态规划大模型,利用仿真场景与真实数据构建具身智能数据,Walker S1具备高级意图理解和细粒度任务规划能力,其创新应用和实现难度在全球属于行业第一梯队水平。

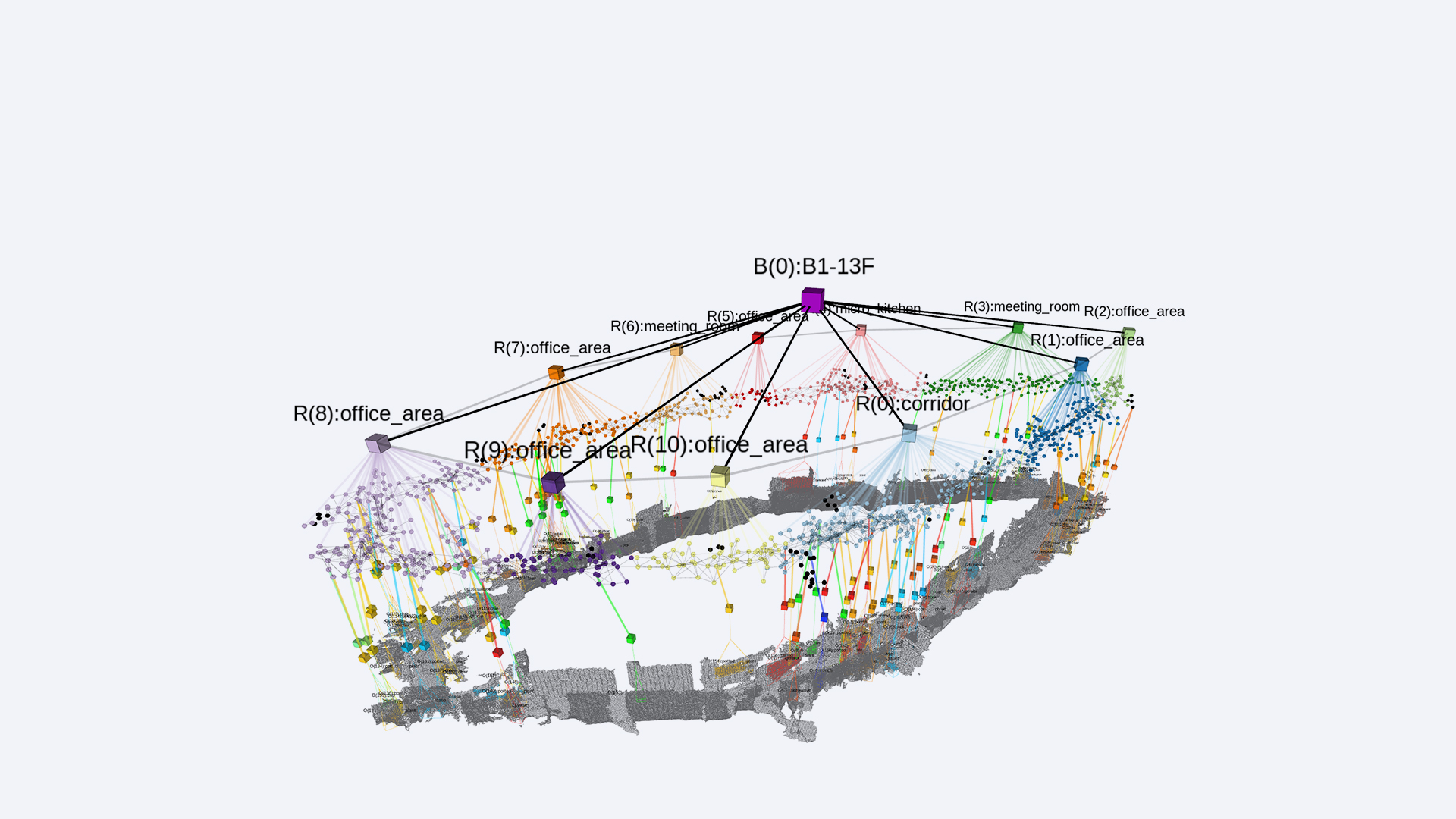
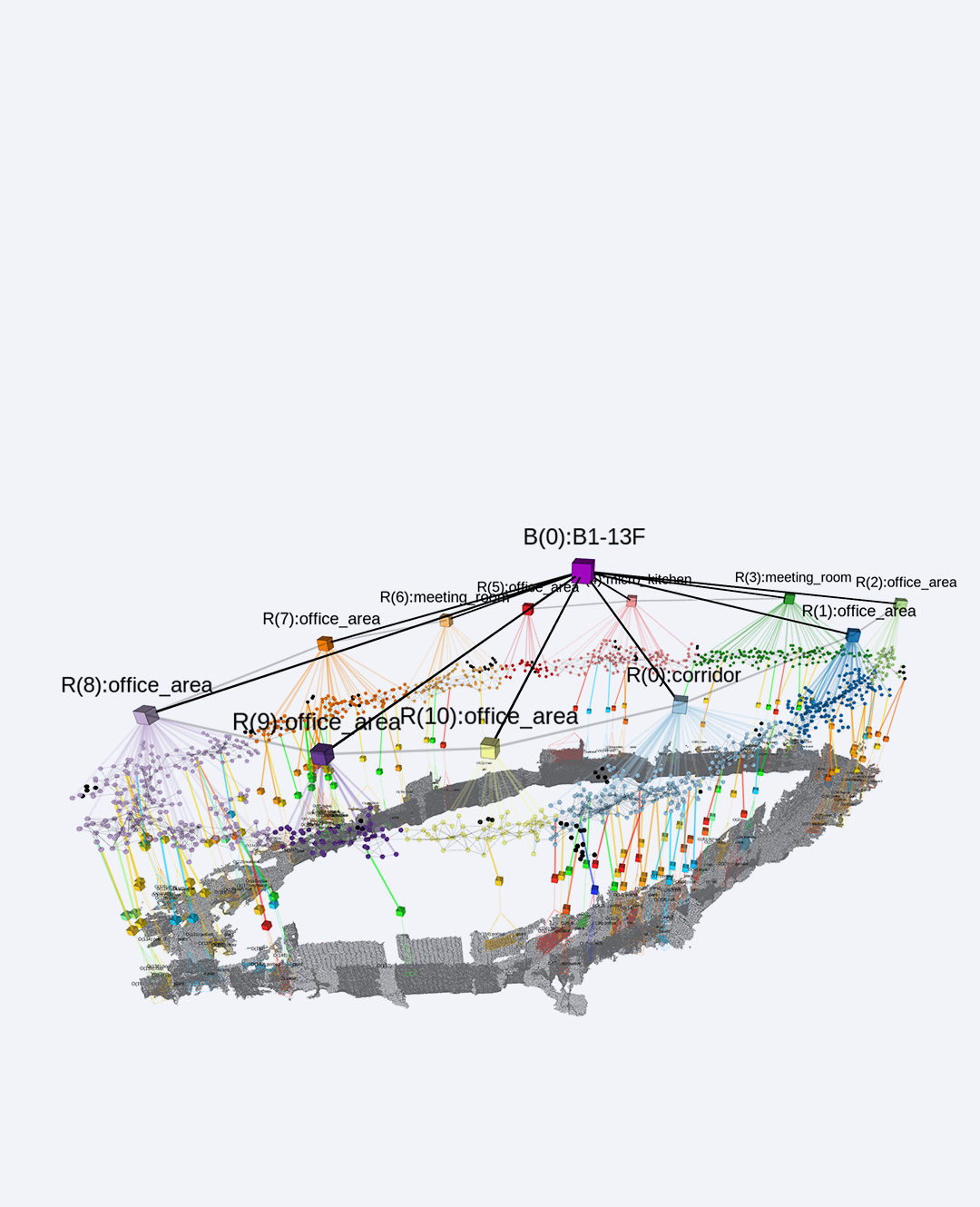
通过设计语义感知信息与传统VSLAM紧耦合方法,实现由粗到精的
二阶段语义导航,提升了Walker S1对空间的理解能力,
满足工业场景泛化需求。
通过设计语义感知信息与传统VSLAM紧耦合方法,实现
由粗到精的二阶段语义导航,提升了Walker S1对空间
的理解能力,满足工业场景泛化需求。
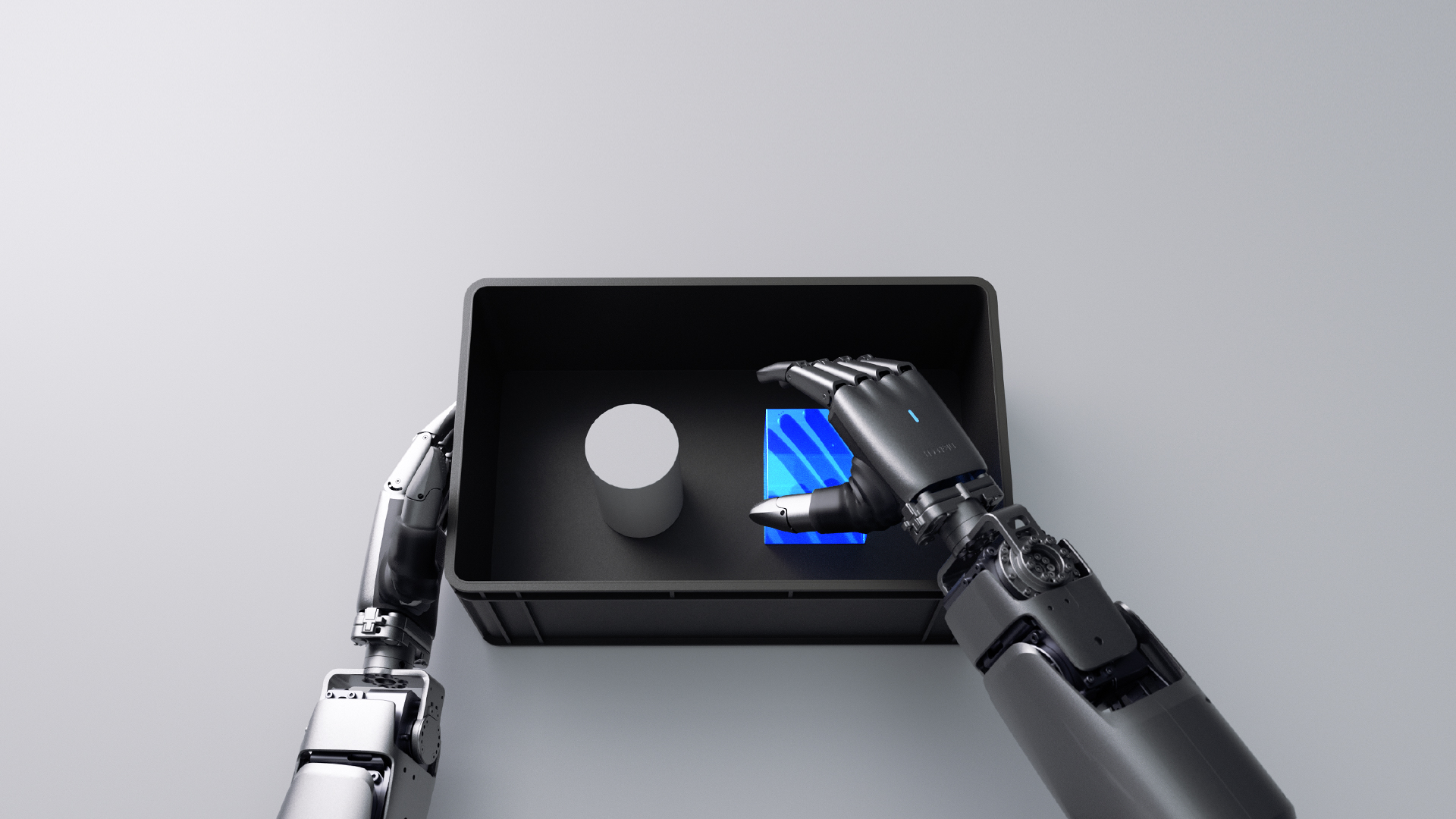
感控一体、端到端学习型的全身运动控制框架,可有效支持Walker S1的灵巧操作
和稳定行走,提升其对于复杂非结构化的工业场景任务的泛化执行能力。
感控一体、端到端学习型的全身运动控制框架,可有效
支持Walker S1的灵巧操作和稳定行走,提升其对于复
杂非结构化的工业场景任务的泛化执行能力。

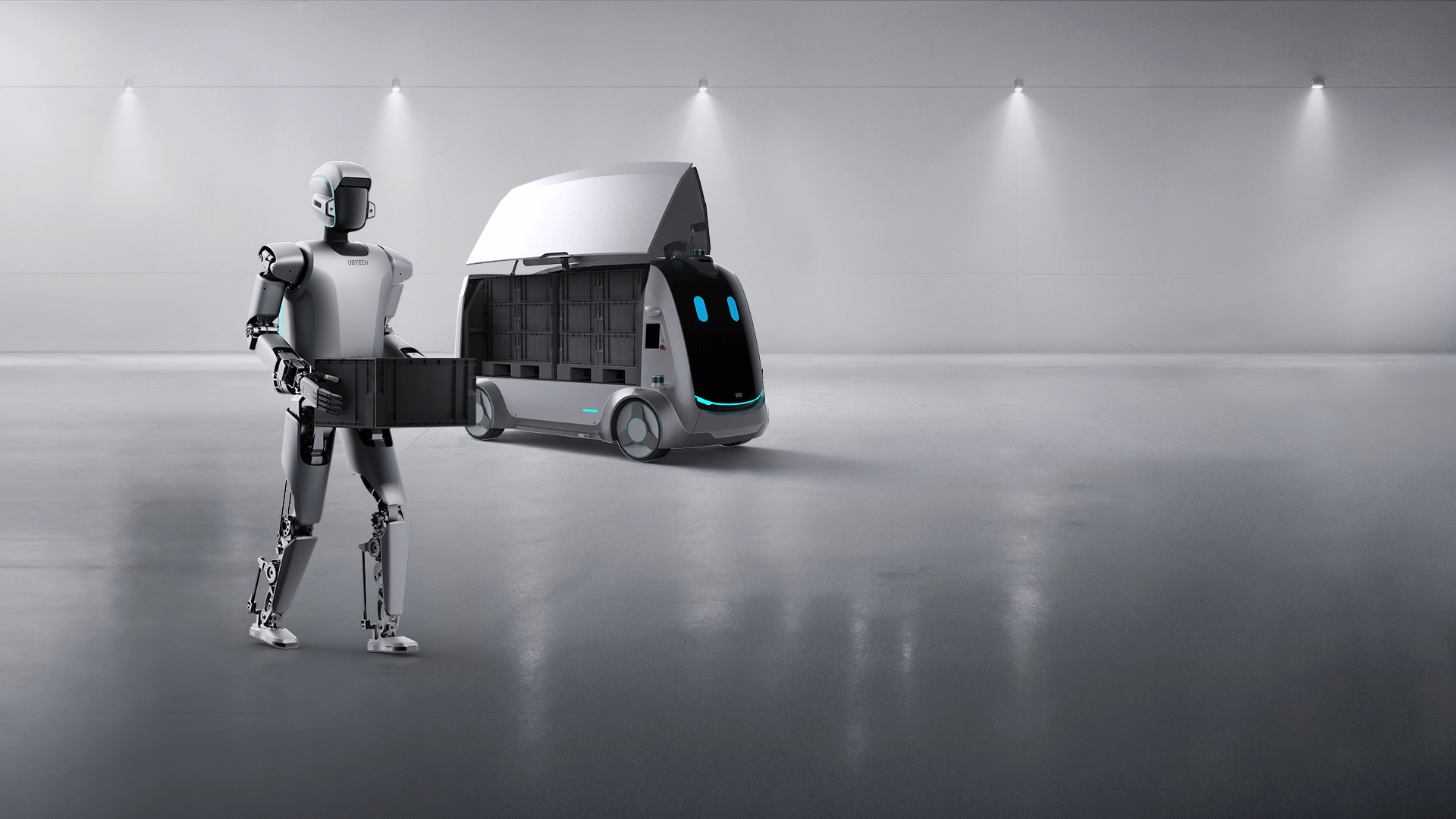
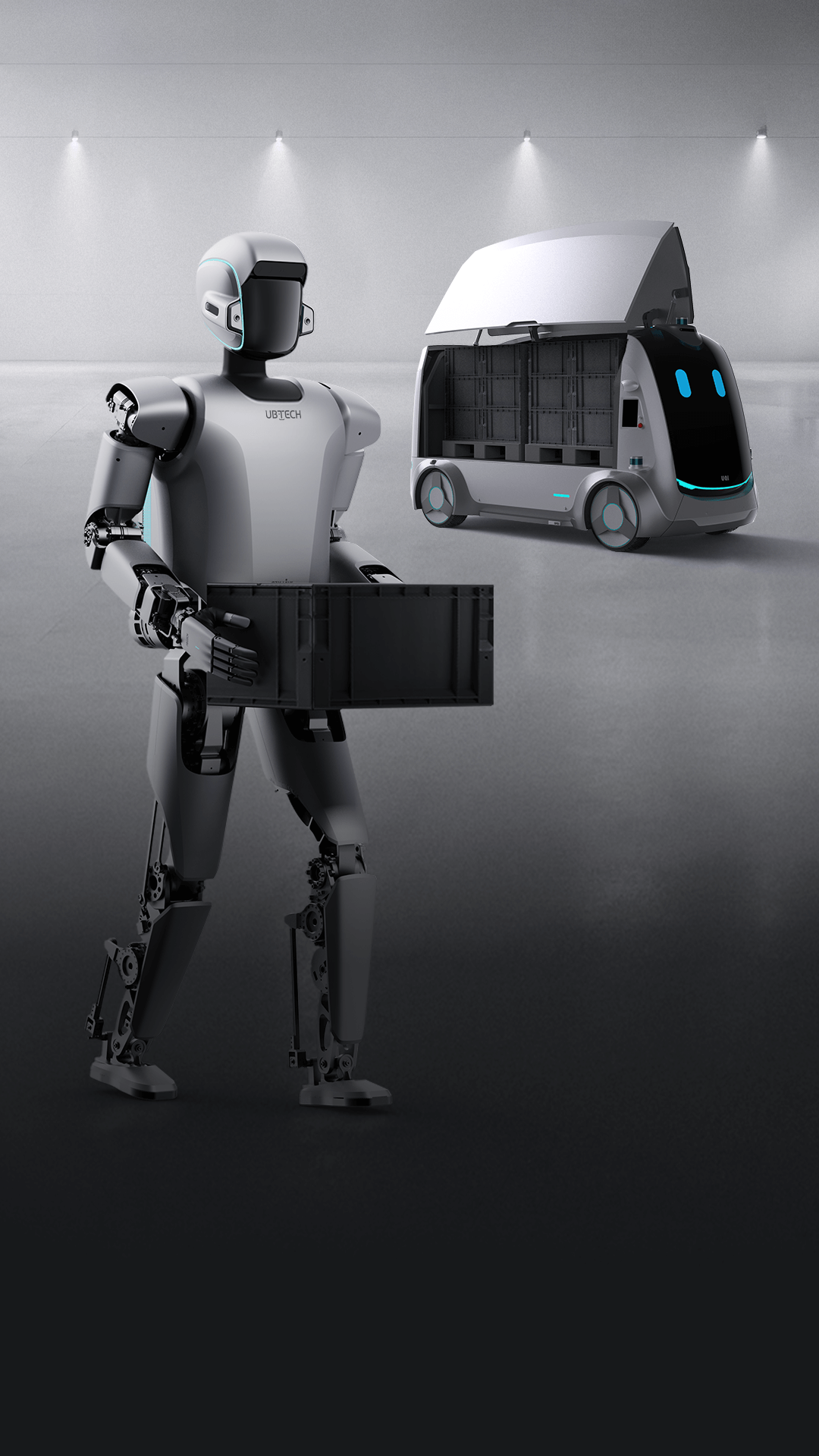
Walker S1已进入汽车工厂实训,与L4级无人物流车、无人叉车、工业移动机器人和智能制造管理系统的协同作业,是全球范围内首个人形机器人与无人物流车等协同作业的工业场景解决方案。