
每一步前进 只为与你同行
大型人形机器人
视频介绍
立即咨询
每一步前进
只为与你同行
大型人形机器人
视频介绍
立即咨询
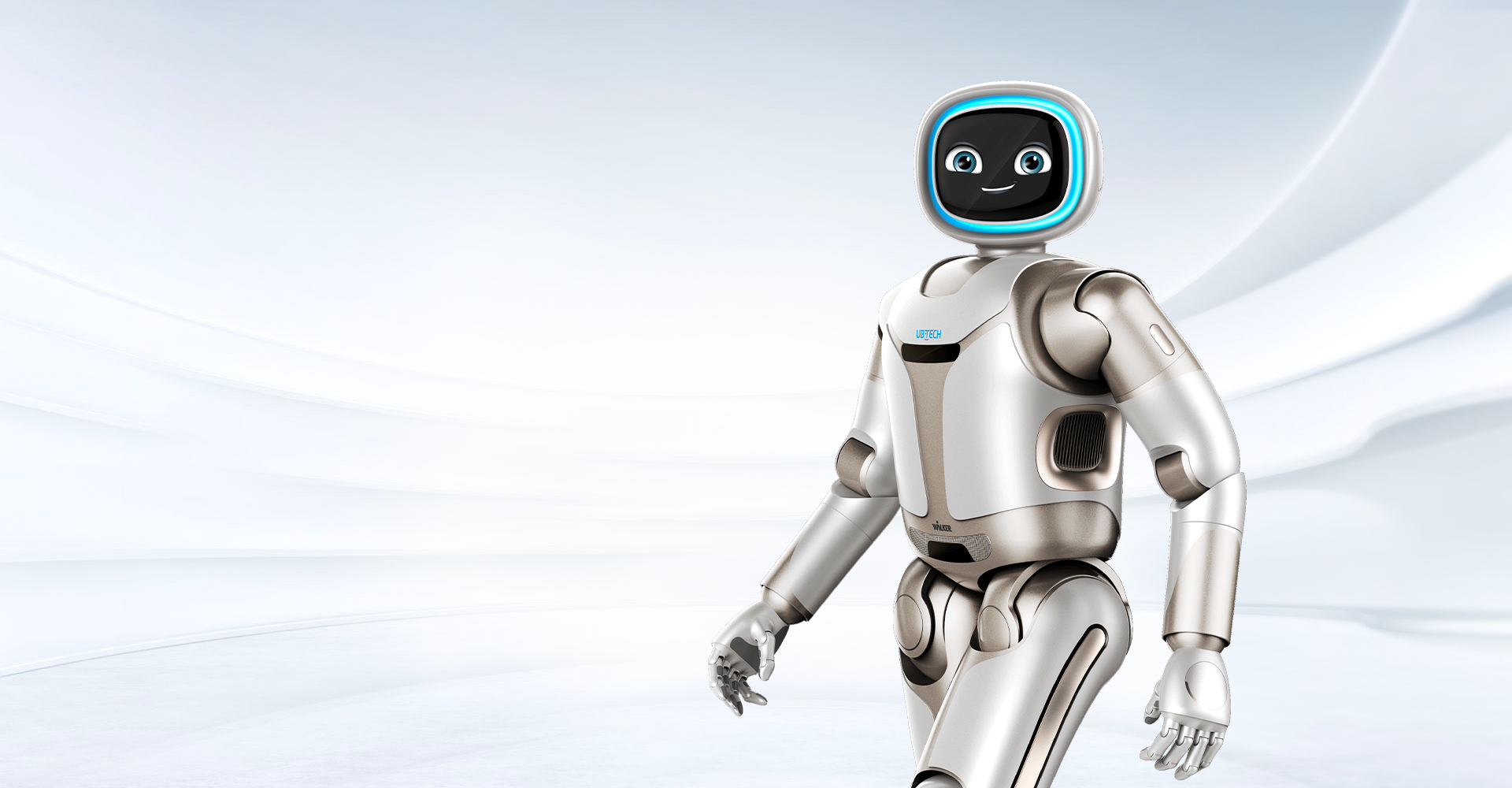
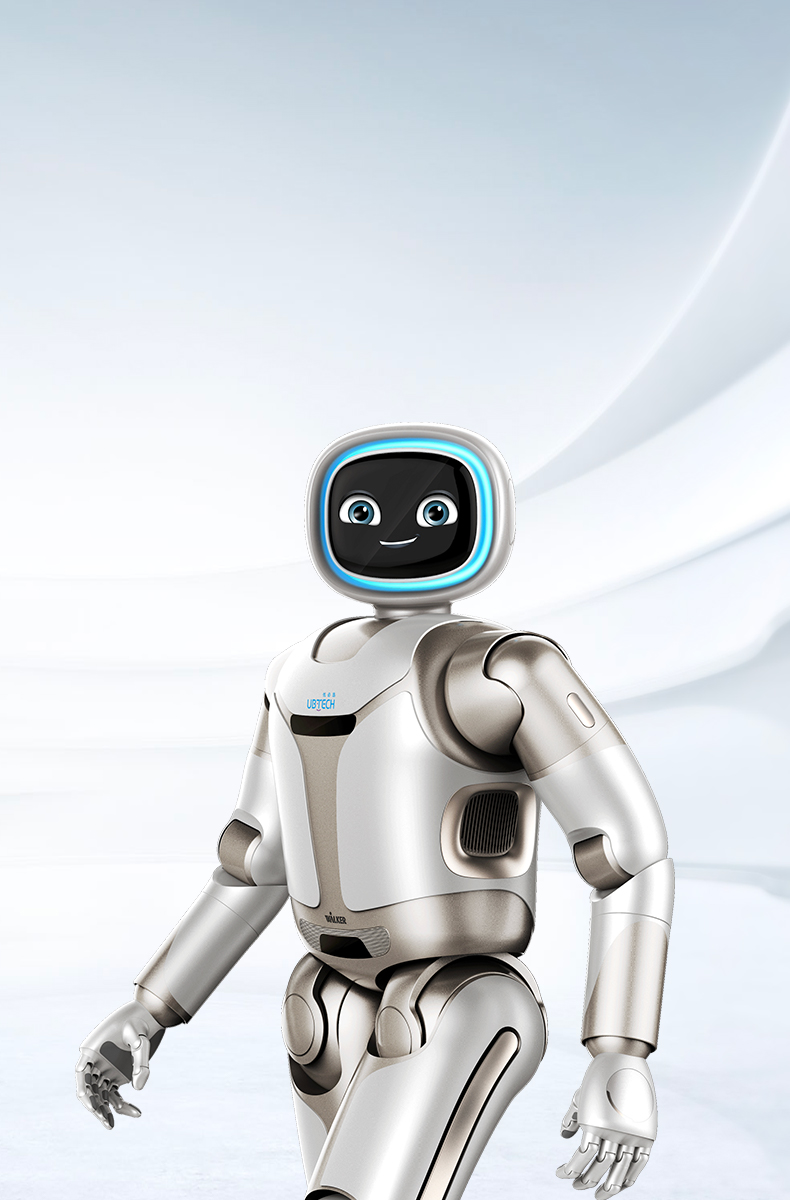
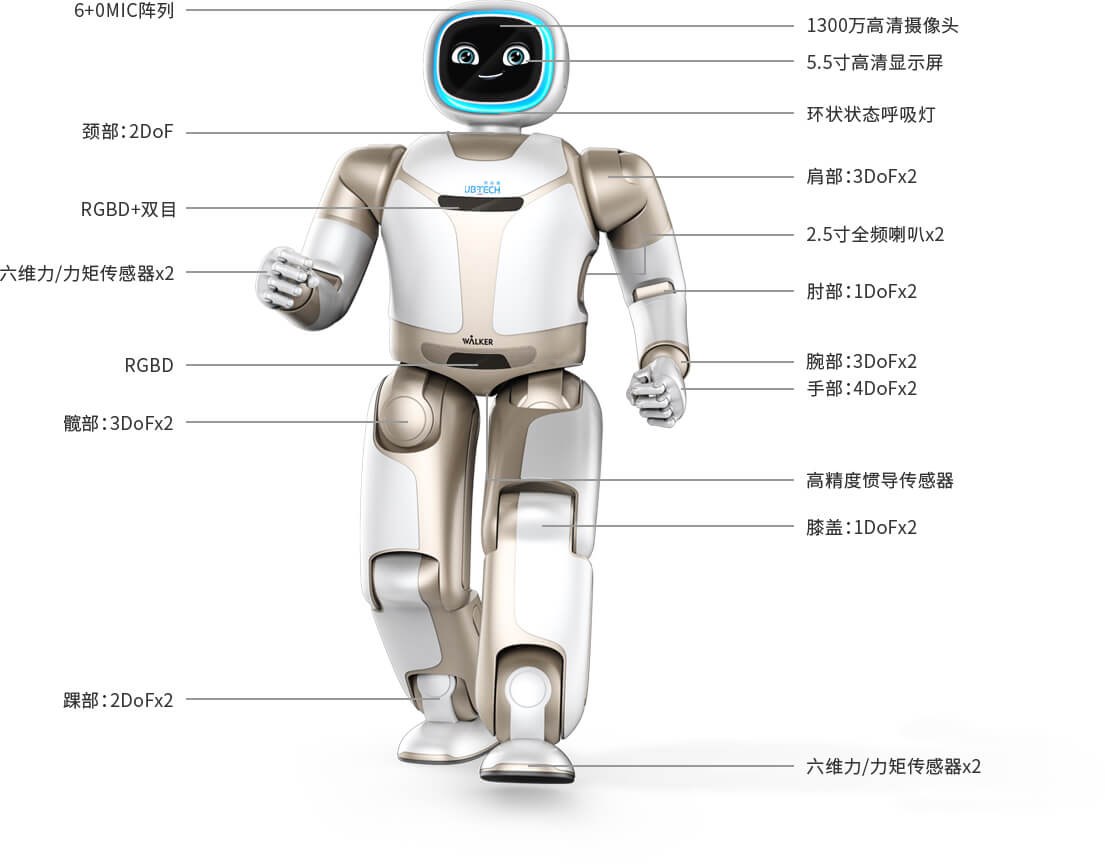
优必选Walker机器人
Walker机器人的问世是优必选为实现“让机器人走进千家万户”这一目标迈出的坚实一步。Walker 新一代具备 36 个高性能伺服关节以及力觉、视觉、听觉、空间知觉等全方位的感知系统,可以实现平稳快速的行走和灵活精准的操作。Walker 新一代具备了在常用家庭场景和办公场景的自由活动和服务的能力,开始真正走入人们的生活。
开启机器人智能服务新时代

复杂地形灵活行走

自平衡能力

手眼协调操作
柔性安全交互

U-SLAM导航避障
人脸/物体/场景识别

多模态交互

智能家居控制
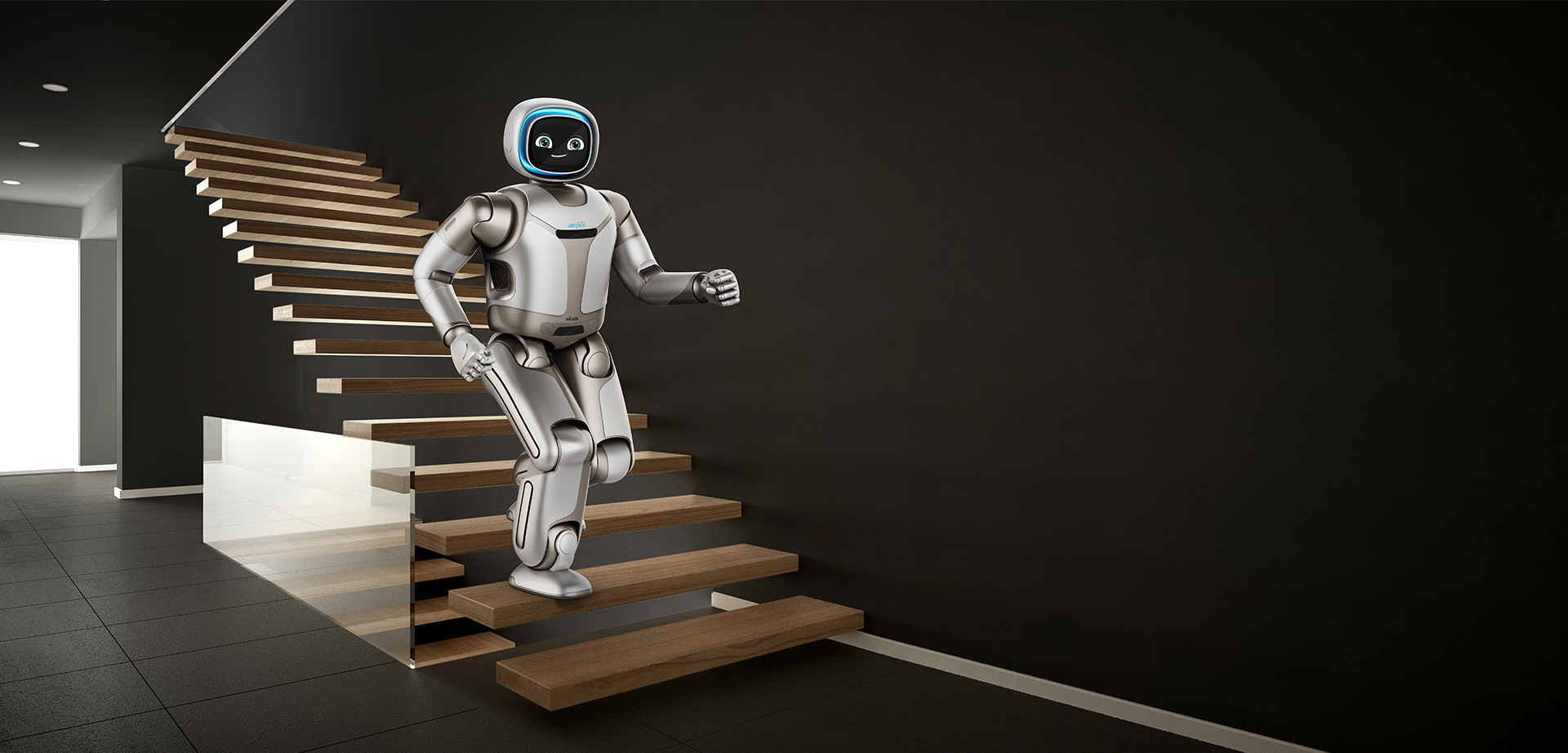
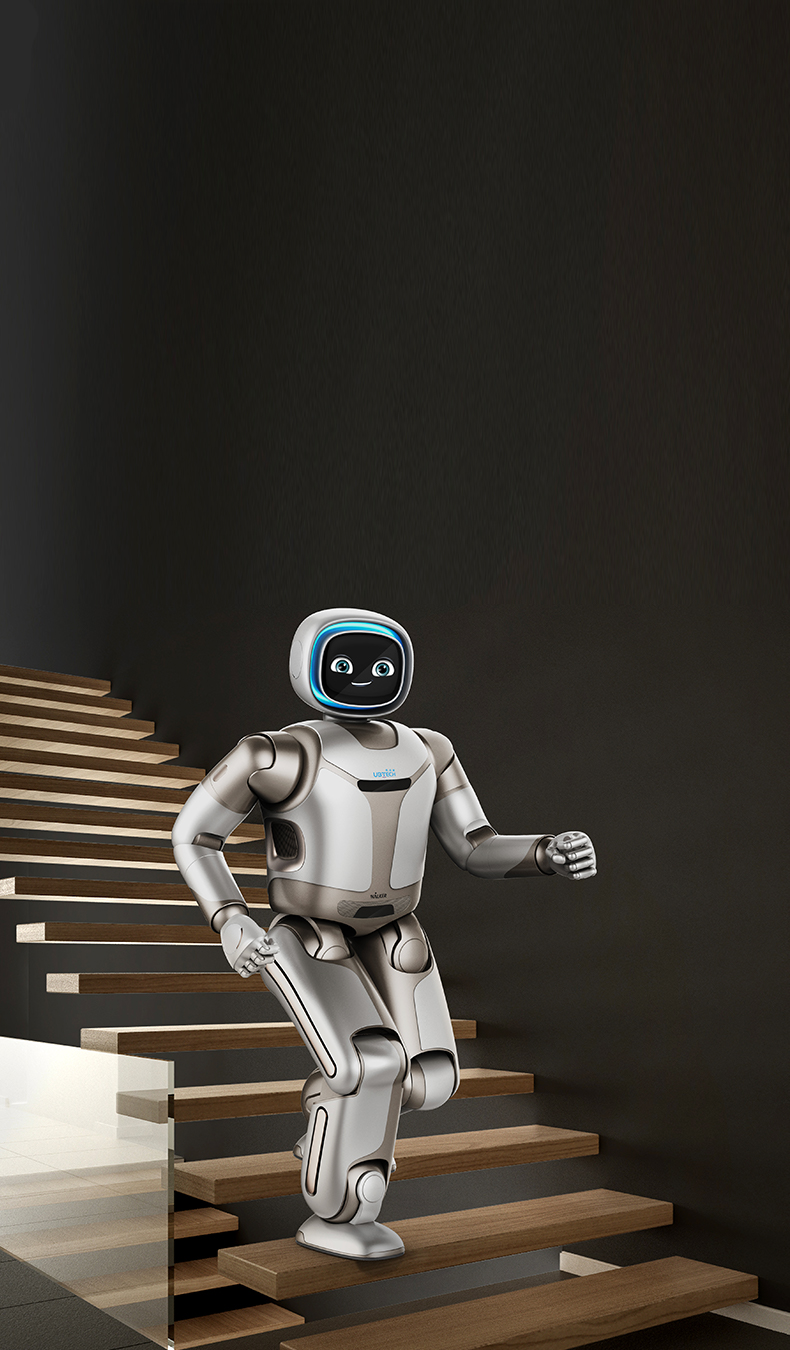
复杂地形灵活行走
Walker通过步态规划与控制,能够实现在地毯、地板、大理石等不同材质地面的稳定行走,同时能够适应障碍物、斜坡、台阶、不平整地面等复杂环境。借助于先进的控制算法,Walker能在快速行走的同时保持姿态稳定。

地毯

地板

草地

楼梯

上坡

瓷砖

障碍


自平衡能力
Walker在站立或行走过程中,受到外部冲击扰动或惯性扰动时,通过腿部的柔顺控制调整自己的本体姿态,从而可以保持自身的平衡;当外部扰动过大时,他可通过调整步态和控制算法来获得平衡。
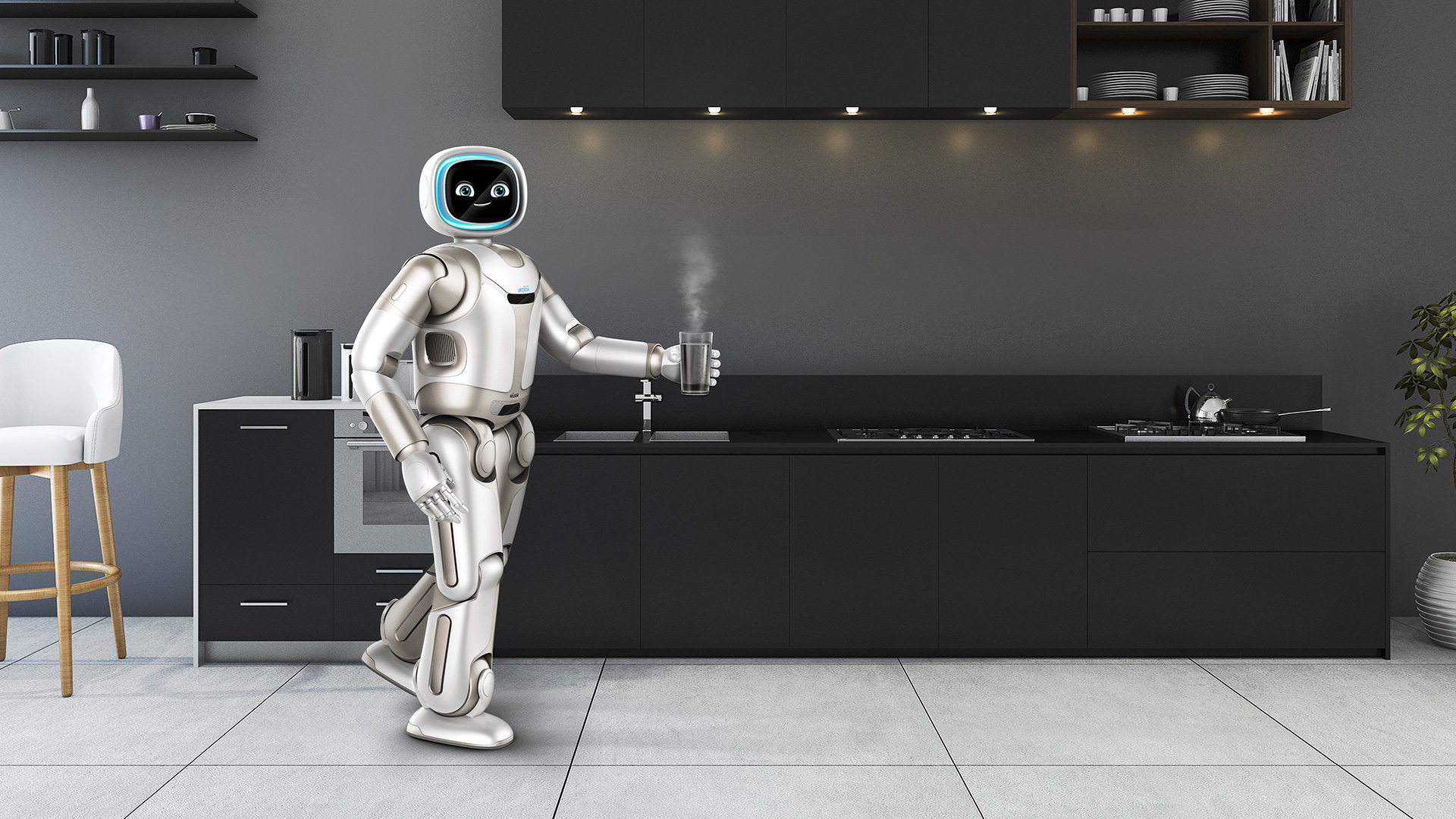
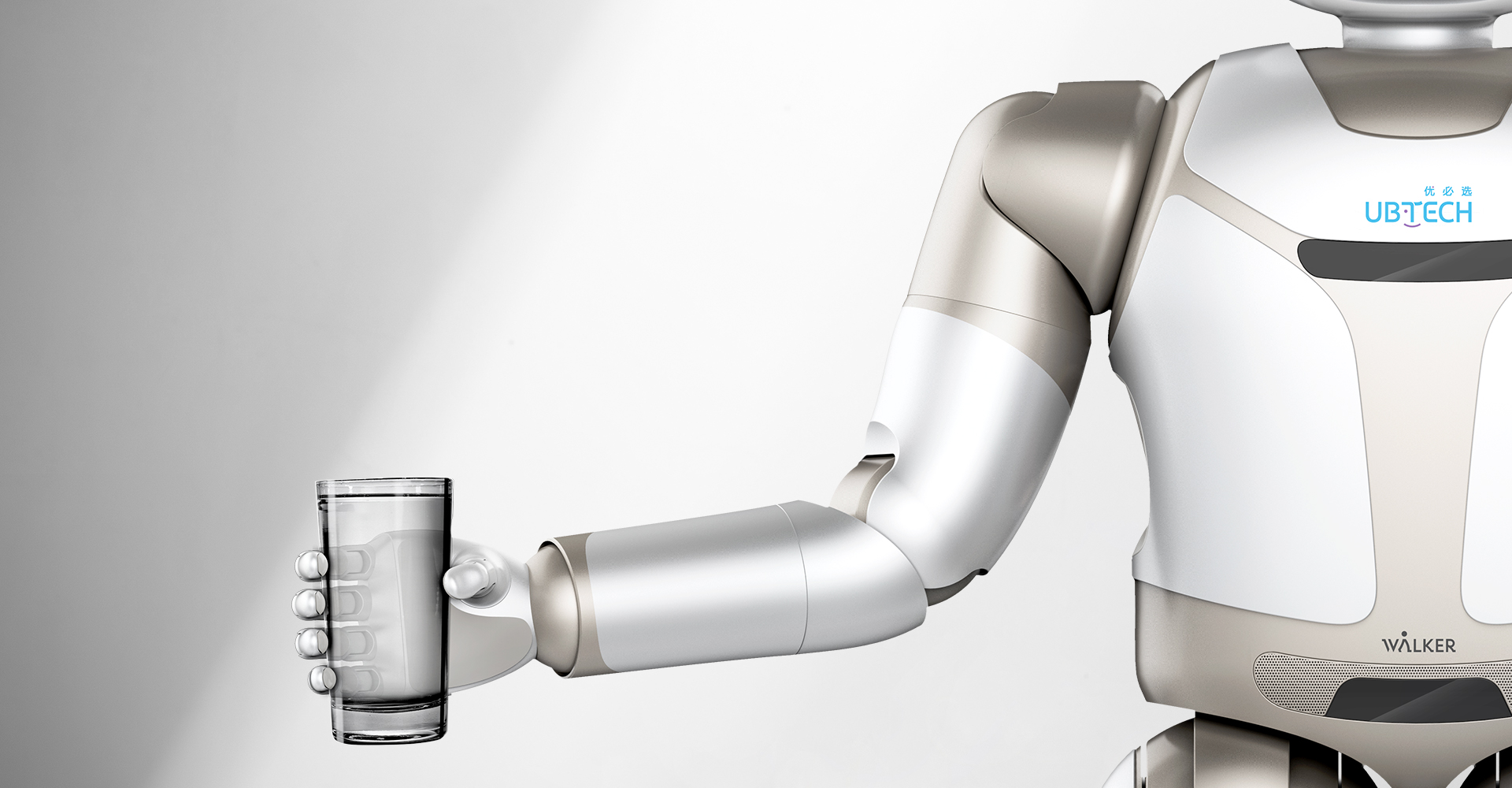
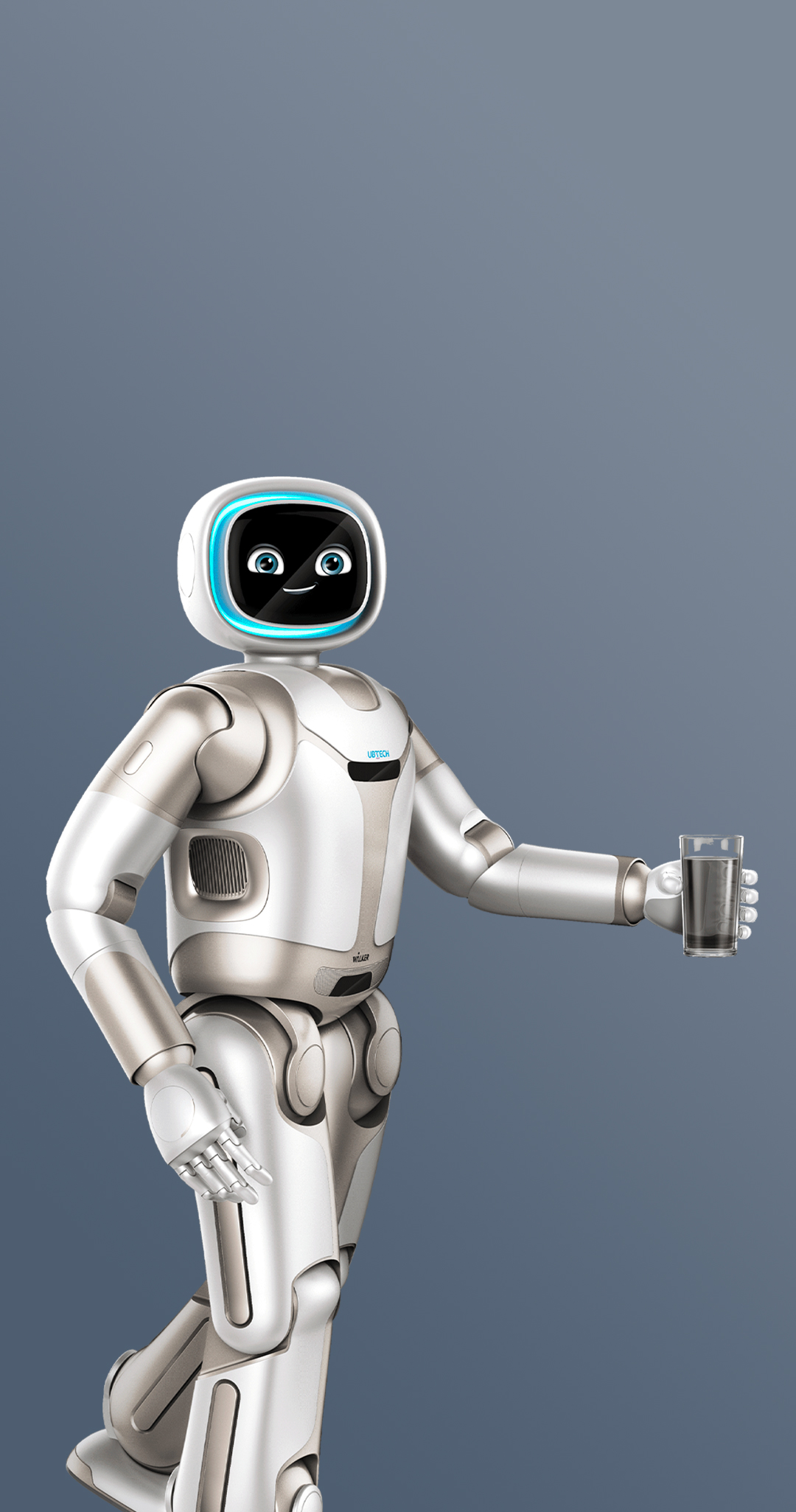
手眼协调操作
Walker拥有一对七自由度机械臂,可以实现更大的手臂操作空间,获得灵活的操作能力以及避障能力。通过与自身视觉感知、力感知的配合,Walker可以获得外部运动物体的位置及姿态信息,实时地配合运动物体进行相应的操作。
柔性安全交互
Walker不再是刚性物体,实现了全身柔顺控制,与外界交互的时候自身会更加安全。当Walker受到外部冲击时,可以使自身不受到伤害。这使得Walker能够更好的适应外界的不确定性,增强自身的工作安全性和可靠性。



U-SLAM 导航避障
Walker实现了视觉导航,可以获得外界环境中更加丰富的诸如轮廓、颜色、深度等环境信息,无需在环境中使用标记物等帮助Walker进行定位,从而提高了对运动物体的抗干扰能力,实现动态场景下更加高效、高精度、高稳定性的自主导航。
人脸/物体/场景识别
Walker具备强大的机器视觉能力,可在复杂背景环境中检测识别相应的人脸、物体和场景。人体数据包括性别、年龄、身份、情绪、姿态等多种信息,物体数据包括位姿、类别、操作点等信息,为Walker进行交互和操作提供稳定的外部信息,场景识别包括Walker所处场景的种类和特征。
多模态人机交互体验
“模态”(Modality)即“感官”,多模态即将多种感官融合,通过文字、语音、视觉、动作、环境等多种方式进行人机交互,充分模拟人与人之间的交互方式。

文字

语音

视觉

动作
环境


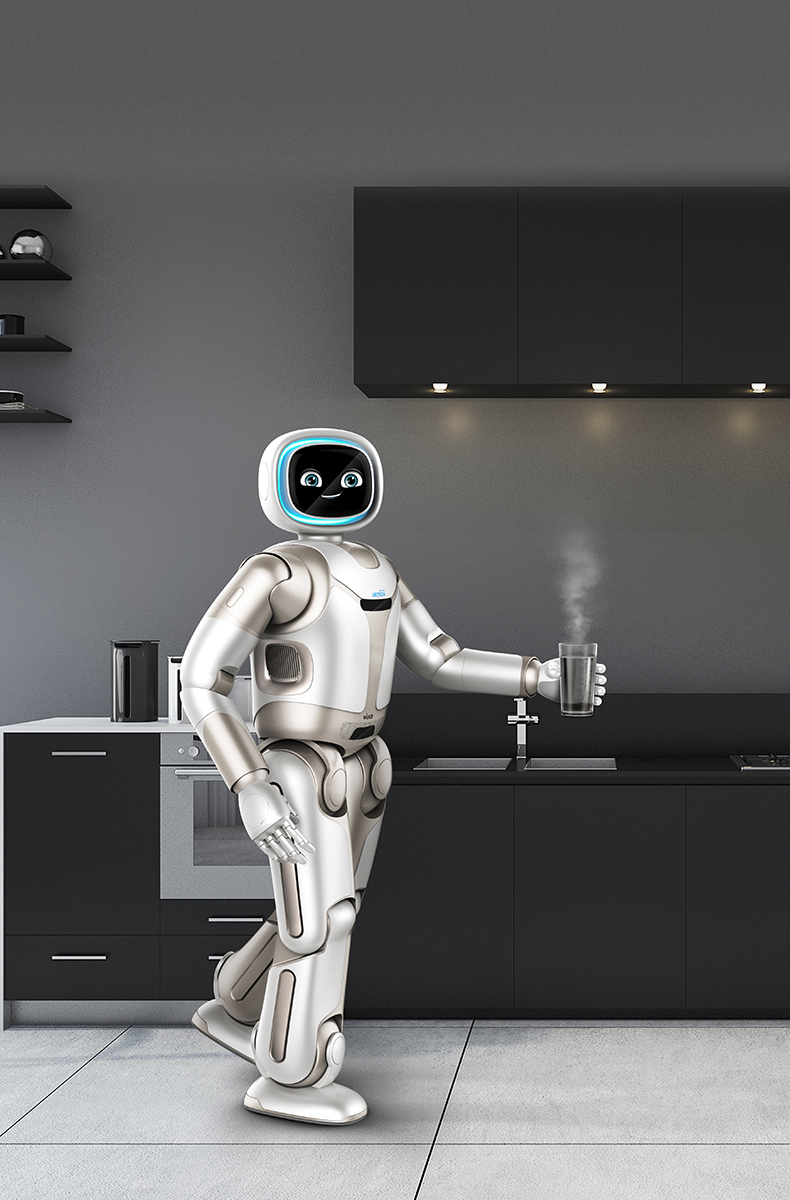
智能家居控制
Walker作为家庭智能中心,具备开放、灵活、丰富、便捷的智能家居接口,能够利用依据用户习惯和场景,协助用户自主控制灯光、电器和插座等常见家庭设备,提升家居智能性、安全性、便利性和舒适性。
产品参数
- 基本参数 :
身高:145cm 重量:77kg
- 36个自由度 :
腿:6x2 臂:7x2 手:4x2 颈:2
- 一体化驱动单元 :
无框力矩电机 精密谐波减速 驱动控制器 双编码器
- 操作 :
负载:伸展状态单臂1.5kg 臂展:单臂540mm
- 连接 :
Wi-Fi: 802.11 a/b/g/n 5G/2.4 GHz双频 Ethernet : RJ45接口 EtherCAT:高速实时总线
- 电源 :
磷酸铁锂电池 54.6V/10Ah/ 6 kg 充电:2h 使用:2h
- 处理器 :
Intel i7 7500U 频率2.7Ghz Intel i5 6200U 频率2.3Ghz
- 软件系统 :
操作系统:Ubuntu+ Linux RT Preempt+ROS+Android 仿真平台:URDF+Gazebo